Q and K Projections in JAX/Flax NNX
#ml#attention#transformers#self-attention#query-key#bilinear#jax#flax#nnx#implementation#rope
Part 4 of 6Attention Is a Kernel
The explainer argued that and projections turn a dot product into a learned, low-rank, role-aware bilinear form . This is the implementation companion: the Flax NNX attention module, the bilinear form pulled back out of it, its symmetric/antisymmetric split, a toy induction head, RoPE, and the two facts about the factorization you can check with a single assert: the rank budget and the gauge freedom.
Prefer a notebook? Run the whole thing on Kaggle: the same code, block by block, with the math written out and every figure reproduced from a real run.
The whole post is plain JAX and Flax NNX. Nothing here needs a GPU; the shapes are tiny on purpose, because the point is to see the bilinear form, not to benchmark it.
Scaled dot-product attention, with the roles exposed
A head makes two views of each token and compares them. In NNX that is two nnx.Linear layers for and , one for , one for the output, and a scaled dot product in between.
import jax
import jax.numpy as jnp
from flax import nnx
class Attention(nnx.Module):
def __init__(self, d_model: int, n_heads: int, *, rngs: nnx.Rngs):
assert d_model % n_heads == 0
self.n_heads = n_heads
self.d_head = d_model // n_heads
# No bias on q/k: the bilinear form B = W_Q W_Kᵀ is what we want to study.
self.q = nnx.Linear(d_model, d_model, use_bias=False, rngs=rngs)
self.k = nnx.Linear(d_model, d_model, use_bias=False, rngs=rngs)
self.v = nnx.Linear(d_model, d_model, rngs=rngs)
self.o = nnx.Linear(d_model, d_model, rngs=rngs)
def split(self, x): # [b, t, d_model] -> [b, h, t, d_head]
b, t, _ = x.shape
return x.reshape(b, t, self.n_heads, self.d_head).transpose(0, 2, 1, 3)
def __call__(self, x, *, causal: bool = True):
q, k, v = self.split(self.q(x)), self.split(self.k(x)), self.split(self.v(x))
scale = 1.0 / jnp.sqrt(self.d_head) # 1/sqrt(d_k), not 1/d_k
scores = jnp.einsum("bhid,bhjd->bhij", q, k) * scale
if causal:
t = x.shape[1]
mask = jnp.tril(jnp.ones((t, t), dtype=bool))
scores = jnp.where(mask, scores, -jnp.inf)
attn = jax.nn.softmax(scores, axis=-1)
y = jnp.einsum("bhij,bhjd->bhid", attn, v).transpose(0, 2, 1, 3)
return self.o(y.reshape(x.shape))The one number worth pausing on is scale. The entries of grow with the head dimension, so the score is divided by (not ) to keep the softmax out of its saturated region at initialization. Get this wrong and every head collapses onto a single token before training starts.
The bilinear form is hiding in the weights
Where is the bilinear form in that module? Nowhere as a stored array, but everywhere in the scores, and you can pull it out of the weights. nnx.Linear computes with kernel of shape [in, out], so the query of token is where is the kernel. The per-head score is therefore
and is a real matrix you can read straight out of the module.
def head_bilinear(model: Attention, h: int) -> jax.Array:
"""B_h = W_Q^(h) W_K^(h)ᵀ in [d_model, d_model]."""
dh = model.d_head
Wq = model.q.kernel.value[:, h * dh:(h + 1) * dh] # [d_model, d_head]
Wk = model.k.kernel.value[:, h * dh:(h + 1) * dh] # [d_model, d_head]
return Wq @ Wk.T
model = Attention(d_model=32, n_heads=4, rngs=nnx.Rngs(0))
B = head_bilinear(model, h=0) # [32, 32]Two tokens score against each other through B, and the score is directed: x_i @ B @ x_j need not equal x_j @ B @ x_i.
key = jax.random.key(1)
xi, xj = jax.random.normal(key, (2, 32))
print(xi @ B @ xj) # what i asks of j
print(xj @ B @ xi) # what j asks of i: a different numberSplitting B into metric and direction
Every matrix is a symmetric part plus an antisymmetric part, . The symmetric part is a signed metric; the antisymmetric part is pure directedness, and it is the only source of the asymmetry above.
S = 0.5 * (B + B.T) # symmetric: the metric
A = 0.5 * (B - B.T) # antisymmetric: the directedness
xs = jax.random.normal(jax.random.key(2), (16, 32))
quad_B = jnp.einsum("id,de,ie->i", xs, B, xs) # x_i^T B x_i
quad_S = jnp.einsum("id,de,ie->i", xs, S, xs) # x_i^T S x_i
print(jnp.allclose(quad_B, quad_S, atol=1e-5)) # TrueThe allclose is the whole point of the symmetric/antisymmetric section in the explainer: , because vanishes on the diagonal. A head’s directedness is invisible if you only score tokens against themselves; it lives entirely off-diagonal.
A shared projection (one matrix for both sides) can only produce , which is symmetric and positive semidefinite. Separate and buy two things at once: the antisymmetric , and a symmetric part that is free to be indefinite. You can check the indefiniteness directly:
eigs = jnp.linalg.eigvalsh(S)
print(eigs.min(), eigs.max()) # straddles zero: S is indefinite, not a PSD metricA toy induction head
The cleanest directed relation is the induction head: the query reads the current token’s identity, the key reads each position’s previous token, so position attends to positions whose predecessor matches token , and copies what came next.
vocab = ["a", "b", "c"]
seq = ["a", "b", "c", "a", "b", "c", "a", "b"]
idx = jnp.array([vocab.index(t) for t in seq])
E = jnp.eye(len(vocab)) # one-hot identities
q = E[idx] # query = current-token identity
k = jnp.concatenate([jnp.zeros((1, len(vocab))), E[idx[:-1]]]) # key = previous token
scores = q @ k.T # [n, n]: 1 where tok_i == tok_{j-1}
n = len(seq)
causal = jnp.tril(jnp.ones((n, n), bool), k=-1) & (jnp.arange(n)[None, :] >= 1)
scores = jnp.where(causal, scores, -jnp.inf)
attn = jax.nn.softmax(scores / 0.1, axis=-1)
pred = attn @ E[idx] # copy the attended token
print(vocab[int(pred[-1].argmax())]) # -> "c": after the latest "b", predict "c"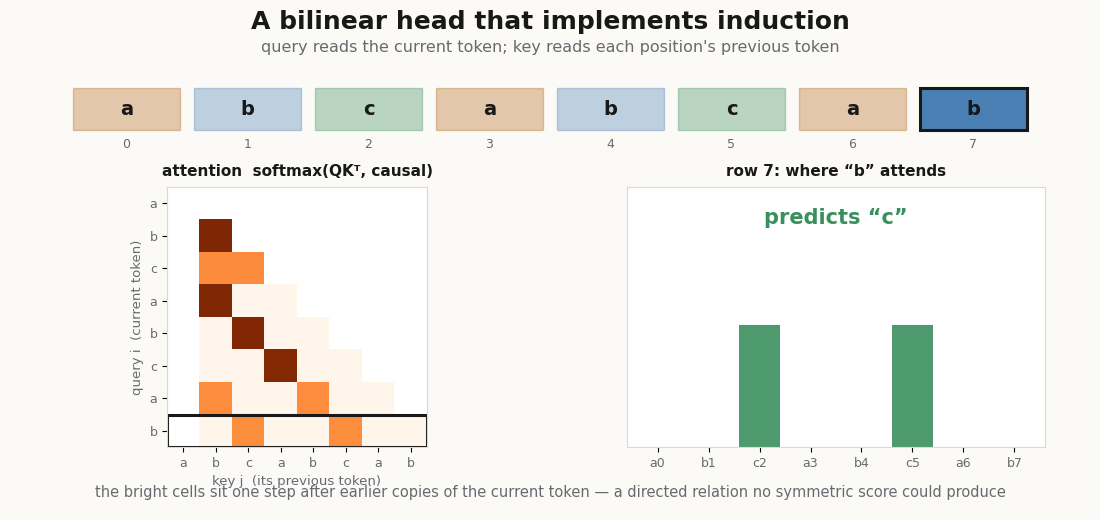
b predicts c. The bright stripe is a directed relation no symmetric score could produce.In a real model q and k are not one-hot embeddings but the outputs of W_Q and W_K; the induction circuit is just a particular that pairs current-token query features against previous-token key features. The asymmetry (“ask for my identity, answer with my predecessor”) is exactly what a non-symmetric allows and a shared projection forbids.
Position lives inside the bilinear form: RoPE
The induction relation was positional, yet nothing in Attention knows about position. How does position get into a score that only sees and ? Rotary embeddings put it inside the comparison: rotate and by their positions and the score comes to depend only on the relative offset. The implementation is a rotate_half and a pair of cos/sin tables.
def rotate_half(x):
x1, x2 = x[..., ::2], x[..., 1::2]
return jnp.stack([-x2, x1], axis=-1).reshape(x.shape)
def rope(x, positions, base=10000.0):
"""x: [..., t, d_head] (d_head even); positions: [t]."""
d = x.shape[-1]
inv_freq = base ** (-jnp.arange(0, d, 2) / d) # [d/2]
ang = positions[:, None] * inv_freq[None, :] # [t, d/2]
cos = jnp.repeat(jnp.cos(ang), 2, axis=-1)
sin = jnp.repeat(jnp.sin(ang), 2, axis=-1)
return x * cos + rotate_half(x) * sinNow the score between a fixed query and key depends only on the gap between their positions:
qv = jax.random.normal(jax.random.key(3), (8,))
kv = jax.random.normal(jax.random.key(4), (8,))
pos = jnp.arange(64)
qr = rope(jnp.broadcast_to(qv, (64, 8)), pos)
kr = rope(jnp.broadcast_to(kv, (64, 8)), pos)
# score(i, j) depends only on i - j
s = jnp.einsum("id,jd->ij", qr, kr)
print(jnp.allclose(jnp.diag(s, 5), jnp.diag(s, 5)[0], atol=1e-5)) # constant along a diagonalPosition is not added to the residual stream here; it is a rotation applied inside the bilinear form, modulating the relation itself.
rope function above, swept. One fixed content pair (q, k) is rotated by s·position as the strength s goes from 0 to 1: at s = 0 the matrix is a single constant (no position, every pair scores q·k), and as s rises the scores organize into constant diagonals. The highlighted diagonal Δ = 8 stays a flat line the whole way, its real max − min spread printed at 0.0000 every frame, because the score depends on the two positions only through i − j. Rendered by scripts/render_qk_rope_gif.py.Two facts about the factorization
It is rank-limited. Because with , the rank of is at most . The singular spectrum shows it: exactly nonzero values, the rest numerical dust.
sv = jnp.linalg.svd(B, compute_uv=False)
print(int((sv > 1e-5).sum()), "nonzero singular values, d_head =", model.d_head)
# parameters: 2*d_model*d_k vs a full B's d_model**2That cap is an inductive bias: each head gets a bounded relational vocabulary, and multi-head attention works because different heads spend the budget on different relations.
Only the product is identified. The split into and is not unique. For any invertible , gives the same and therefore the same scores: a gauge freedom.
dh = model.d_head
Wq = model.q.kernel.value[:, :dh]
Wk = model.k.kernel.value[:, :dh]
M = jax.random.normal(jax.random.key(5), (dh, dh))
Wq2 = Wq @ M
Wk2 = Wk @ jnp.linalg.inv(M).T
print(jnp.allclose(Wq @ Wk.T, Wq2 @ Wk2.T, atol=1e-4)) # True: same bilinear formSo an individual query coordinate has no canonical meaning; what is identified is the relation and the query/key subspaces it pairs, not a basis inside them.
scripts/render_qk_extra_gifs.py.Train the induction head for real
The one-hot induction head above was wired by hand. Can gradient descent find the same directed relation on its own? Hand the model only the features and the task and see. Each sequence is a random 6-token pattern (distinct tokens from a vocabulary of 8) repeated four times; each position’s features are [current token ; previous token], one-hot; and the model must predict the next token. From the second repeat on, induction answers perfectly: find the position whose predecessor matches my token, and copy it.
The head is an ordinary nnx.Module, so it drops into the standard NNX loop (with current NNX, nnx.Optimizer takes wrt=nnx.Param and update receives the model and the gradients).
import optax
V, P = 8, 6 # vocab size; a P-token random pattern, repeated 4 times
def induction_batch(key, batch=64):
keys = jax.random.split(key, batch)
pat = jax.vmap(lambda k: jax.random.permutation(k, V)[:P])(keys)
toks = jnp.tile(pat, (1, 4)) # [batch, 24]
prev = jnp.pad(toks[:, :-1], ((0, 0), (1, 0)), constant_values=0)
x = jnp.concatenate([jax.nn.one_hot(toks, V), jax.nn.one_hot(prev, V)], -1)
return x, toks # features: [current token ; previous token]
class InductionLM(nnx.Module):
def __init__(self, *, rngs: nnx.Rngs):
self.attn = Attention(d_model=2 * V, n_heads=1, rngs=rngs)
self.readout = nnx.Linear(2 * V, V, rngs=rngs)
def __call__(self, x):
return self.readout(self.attn(x, causal=True))
model = InductionLM(rngs=nnx.Rngs(0))
optimizer = nnx.Optimizer(model, optax.adamw(3e-3), wrt=nnx.Param)
@nnx.jit
def train_step(model, optimizer, batch):
x, toks = batch
def loss_fn(model):
logits = model(x)[:, P:-1] # predict from the second repeat on
labels = toks[:, P + 1:] # the next token
return optax.softmax_cross_entropy_with_integer_labels(logits, labels).mean()
loss, grads = nnx.value_and_grad(loss_fn)(model)
optimizer.update(model, grads)
return loss
key = jax.random.key(42)
for step in range(2001):
key, sub = jax.random.split(key)
loss = train_step(model, optimizer, induction_batch(sub))
if step % 500 == 0:
print(f"step {step:4d} loss {loss:.3f}")
x, toks = induction_batch(jax.random.key(123), batch=512)
pred = model(x)[:, P:-1].argmax(-1)
acc = (pred == toks[:, P + 1:]).mean()
print(f"held-out next-token accuracy: {acc:.3f} (chance {1/V:.3f})")A real run of this block prints:
step 0 loss 2.091
step 500 loss 0.018
step 1000 loss 0.018
step 1500 loss 0.017
step 2000 loss 0.013
held-out next-token accuracy: 0.989 (chance 0.125)And the trained weights contain exactly the directed relation this post has been about. Read back out of the model (the head_bilinear trick from earlier) and compare its four blocks:
Wq, Wk = model.attn.q.kernel.value, model.attn.k.kernel.value
B = Wq @ Wk.T # [2V, 2V]
for name, blk in [("cur->cur", B[:V, :V]), ("cur->prev", B[:V, V:]),
("prev->cur", B[V:, :V]), ("prev->prev", B[V:, V:])]:
print(f"{name:10s} block norm = {jnp.linalg.norm(blk):.1f}")
d = B[:V, V:]
print(f"cur->prev diagonal mean {jnp.diag(d).mean():+.1f} off-diagonal mean {(d.sum() - jnp.diag(d).sum()) / (V*V - V):+.1f}")cur->cur block norm = 12.0
cur->prev block norm = 38.3
prev->cur block norm = 6.0
prev->prev block norm = 7.4
cur->prev diagonal mean +11.4 off-diagonal mean -1.6The current-token-query against previous-token-key block carries three times the norm of any other block, and inside it the diagonal is strongly positive while everything else is mildly repelled: gradient descent rediscovered “ask for my identity, answer with your predecessor.” Nothing about the training loop knows that and form a bilinear relation; the gradient just flows through the scaled dot product. The structure is in the parameterization, and the parameterization is the head’s relational vocabulary.
Rendering the GIFs
Both animations are generated with Python, JAX, and matplotlib: the computation in JAX, the drawing in matplotlib:
python scripts/render_qk_bilinear_gif.py # B = S + A, the symmetric/antisymmetric split
python scripts/render_qk_induction_gif.py # the induction head, swept across query positionsThe first renderer forms the score matrices , , and on a small token cloud and animates ; the second runs the one-hot induction attention and steps the query pointer. Neither is a benchmark; they are visual audits of the shapes, so you can see that the directedness lives off-diagonal and that the induction stripe is exactly one step below the matched positions.
What this leaves out
A production attention layer would add dropout, KV caching for decoding, head-wise mixed precision, and a fused attention kernel (so the scores never leave fast memory). It would also usually apply RoPE per-head inside __call__ rather than as the standalone function above. None of that changes the object this post is about: a learned, low-rank, role-asymmetric bilinear form, factored into a query role and a key role, then normalized into a distribution over values.
References: Flax NNX Module API; scaled dot-product attention from Vaswani et al. (2017); the QK circuit from Elhage et al. (2021); induction heads from Olsson et al. (2022); RoPE from Su et al. (2021).
Cite as
Bouhsine, T. (). Q and K Projections in JAX/Flax NNX. Records of the !mmortal Data Scientist. https://tahabouhsine.com/blog/qk-projections-jax-flax-nnx/
BibTeX
@misc{bouhsine2026qkprojectionsjaxflaxnnx,
author = {Bouhsine, Taha},
title = {Q and K Projections in JAX/Flax NNX},
year = {2026},
month = {jun},
howpublished = {\url{https://tahabouhsine.com/blog/qk-projections-jax-flax-nnx/}},
note = {Blog post, Records of the !mmortal Data Scientist}
}References
- (2017). Attention Is All You Need. NeurIPS 2017.arXiv:1706.03762
- (2021). A Mathematical Framework for Transformer Circuits. Transformer Circuits Thread.
- (2022). In-context Learning and Induction Heads. Transformer Circuits Thread.arXiv:2209.11895
- (2021). RoFormer: Enhanced Transformer with Rotary Position Embedding. arXiv preprint.arXiv:2104.09864